

สินค้า



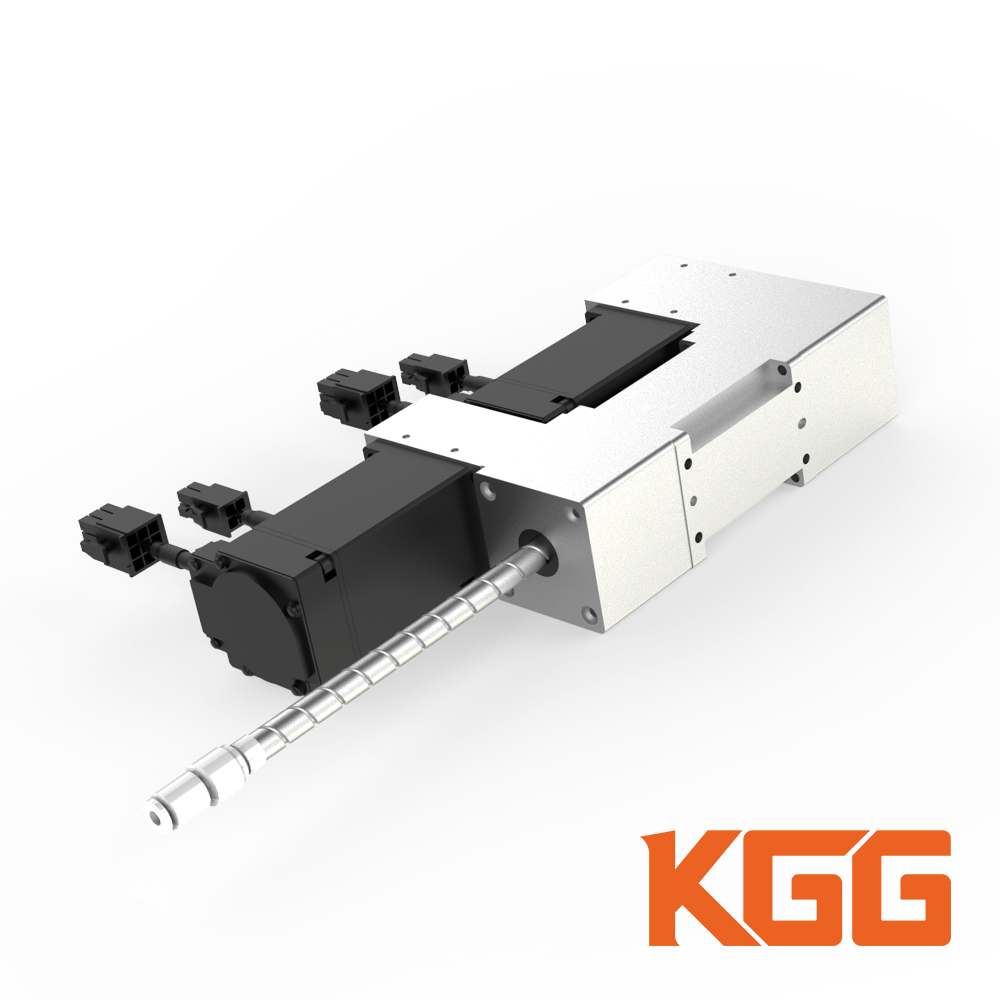


ตัวกระตุ้นแกน ZR
แอคชูเอเตอร์แกน ZR ใช้มอเตอร์กลวงเพื่อขับเคลื่อนแกน Z เพื่อหมุนน็อตบอลสกรูเพื่อให้เกิดการเคลื่อนที่เชิงเส้นขึ้นและลง ซึ่ง ณ จุดนี้ น็อตบอลสไปน์จะทำหน้าที่เป็นโครงสร้างหยุดและนำทางแกนสกรู น็อตบอลสกรูและน็อตบอลสไปน์จะหมุนด้วยความเร็วและทิศทางเดียวกัน ทำให้เพลาขับหมุนในจุดเดิมโดยไม่มีการเคลื่อนที่เชิงเส้นขึ้นและลง แอคชูเอเตอร์เพลา ZR สามารถใช้งานร่วมกับแกนหลายแกนเพื่อประหยัดเวลาในการจัดการชิ้นส่วนอย่างรวดเร็ว
ข้อดีของผลิตภัณฑ์:
01. ระยะห่างแกน 0
02. เสียงรบกวนต่ำและการเคลื่อนไหวที่ราบรื่น
03. โครงสร้างไฮบริดแบบกะทัดรัดและน้ำหนักเบา
04. การสร้างตัวเข้ารหัสแบบวงปิด
05. สามารถควบคุมแรงดันได้

บอลสกรูพร้อมบอลสไปน์
สินค้าใหม่ล่าสุดซึ่งใช้ KGG จิ๋วbทั้งหมดsลูกเรือด้วยbทั้งหมดspline(G-BSS) และตระหนักถึงสามฟังก์ชัน ได้แก่ การเคลื่อนที่เชิงเส้น (Z) การเคลื่อนที่หมุน (θ) และสุญญากาศ (V) ด้วยผลิตภัณฑ์หนึ่งรายการ
รูปทรงเพรียวบางเกิดขึ้นได้จากการขับเคลื่อนbทั้งหมดsลูกเรือและbทั้งหมดsเส้นพไลน์nแต่สร้างโดยตรงในhติดตามmมอเตอร์

เชิงเส้นMการเคลื่อนไหว(z)
หลินหูมอทiโดยการขับรถz-แกนmมอเตอร์และการหมุนbทั้งหมดsลูกทีมnut. ในเวลานี้bทั้งหมดsเส้นพไลน์but ทำหน้าที่เป็น 'อุปกรณ์ป้องกันการหมุนและตัวนำสไลด์ของsลูกทีมsด้าม
การหมุน((θ)
หมุนbทั้งหมดsลูกทีมnอุตและbทั้งหมดsเส้นพไลน์nแต่ในเวลาเดียวกัน ความเร็วและทิศทางเดียวกันsด้ามจับหมุนได้โดยไม่เคลื่อนขึ้นและลง
สุญญากาศ (V)
เจาะhต่อไปนี้สามารถใช้งานได้หลากหลาย เช่น ฟังก์ชันดูดและเป่า
ตัวเครื่องบางเฉียบ มีประโยชน์ในการประหยัดพื้นที่เนื่องจากการผสมผสานระหว่าง Hollow Motor + G-BSS (Miniature Ball Screw with Ball Spline)
ไม่มีผงสึกหรอจาก Belt & Pulley เนื่องมาจากโครงสร้าง Direct Drive
จำนวนส่วนประกอบที่น้อยที่สุดทำให้การออกแบบเรียบง่ายและประหยัดพื้นที่
ในกรณีของมอเตอร์ขนาด 42 ไม่เพียงแค่การเคลื่อนที่เชิงเส้น (Z) และแบบหมุน (Θ;theta) เท่านั้น แต่ยังมีฟังก์ชันสุญญากาศ (V) ให้ใช้งานได้อีกด้วย

-การจ่ายของเหลวแบบเพลากลวง
-การจัดการส่วนประกอบ LED แบบรวมหลายแกน
-การปรับมุมเวเฟอร์ IC
-การประกอบเลนส์โทรศัพท์มือถือ
-การติดฉลากโทรศัพท์มือถือ
-สาธิตDผู้สาธิต
สำหรับตัวอย่างเพิ่มเติมโปรดคลิกที่วิดีโอด้านล่าง
คุณจะได้เห็นระบบสายพานลำเลียงใหม่ล่าสุด
ง่ายดายเหมือนกับการประกอบบล็อกตัวต่อ และสามารถออกแบบได้ด้วยรูปแบบเค้าโครงที่หลากหลาย เช่น วงกลม ทางวิ่ง สี่เหลี่ยม ทางลงที่ซับซ้อน แกว่ง และไฮบริด ขึ้นอยู่กับสภาพแวดล้อมในการปฏิบัติงาน
ด้วยการทำงานของตัวกระตุ้นแกน KGG ZR ควบคู่กัน การขนส่งจึงไม่ใช่เรื่องยุ่งยากอีกต่อไป......
| รูปภาพ |  |  |  |  |
| แบบอย่าง | ประเภท ZRIN28 | ประเภท ZRIN42 | ประเภท ZRFS30S | ประเภท ZRFS42S |
| ความกว้าง มม. | 28 มม. | 42 มม. | 30 มม. | 42 มม. |
| ระยะเดินทางสูงสุด มม. | 50มม. | 50มม. | 50มม. | 100 มม. |
| แรงสูงสุด | 5N | 19N | 30N | 50N |
| เส้นผ่านศูนย์กลางสกรู มม. | 6 มม. | 8 มม. | 6 มม. | 8 มม. |
| ดาวน์โหลด PDF | * | * | * | * |
| CAD 2 มิติ/3 มิติ | * | * | * | * |
คุณจะได้รับข่าวจากเราอย่างรวดเร็ว
กรุณาส่งข้อความของคุณมาให้เรา เราจะติดต่อกลับภายในหนึ่งวันทำการ
ช่องที่มีเครื่องหมาย * ทั้งหมดเป็นช่องที่ต้องกรอก
-

บอลสกรูป้องกันสนิมที่มีความแม่นยำสูงและมีตะกั่วสูง ...
-

จารบีหล่อลื่นสูงสำหรับบอลสกรู
-

ลูกกลิ้งทำซ้ำที่มีความแข็งแกร่งสูงและความแม่นยำสูง
-

ตัวกระตุ้นเชิงเส้นแบบรางนำทางในตัว HST
-

KGG GLR สกรูบอลเคลื่อนที่เชิงเส้นแบบแม่นยำพร้อม...
-

มินิกันสนิมตะกั่วสูงและความเร็วสูง...
-

สไลด์ PT ระยะพิทช์แปรผัน
-

มอเตอร์สเต็ปปิ้งและสกรูบอล/ลีดดิ้ง ภายนอก...
-

โหลดที่ซับซ้อนที่มีความแข็งแกร่งสูงการทำงานที่เงียบ...
-

สูงสุด




